How to Change the Size of the Platform and Fences¶
The design of the ilc_platform combined with fences are
in examples/random_pick/random_pick/urdf/ilc_platform/ilc_platform.urdf.xacro.
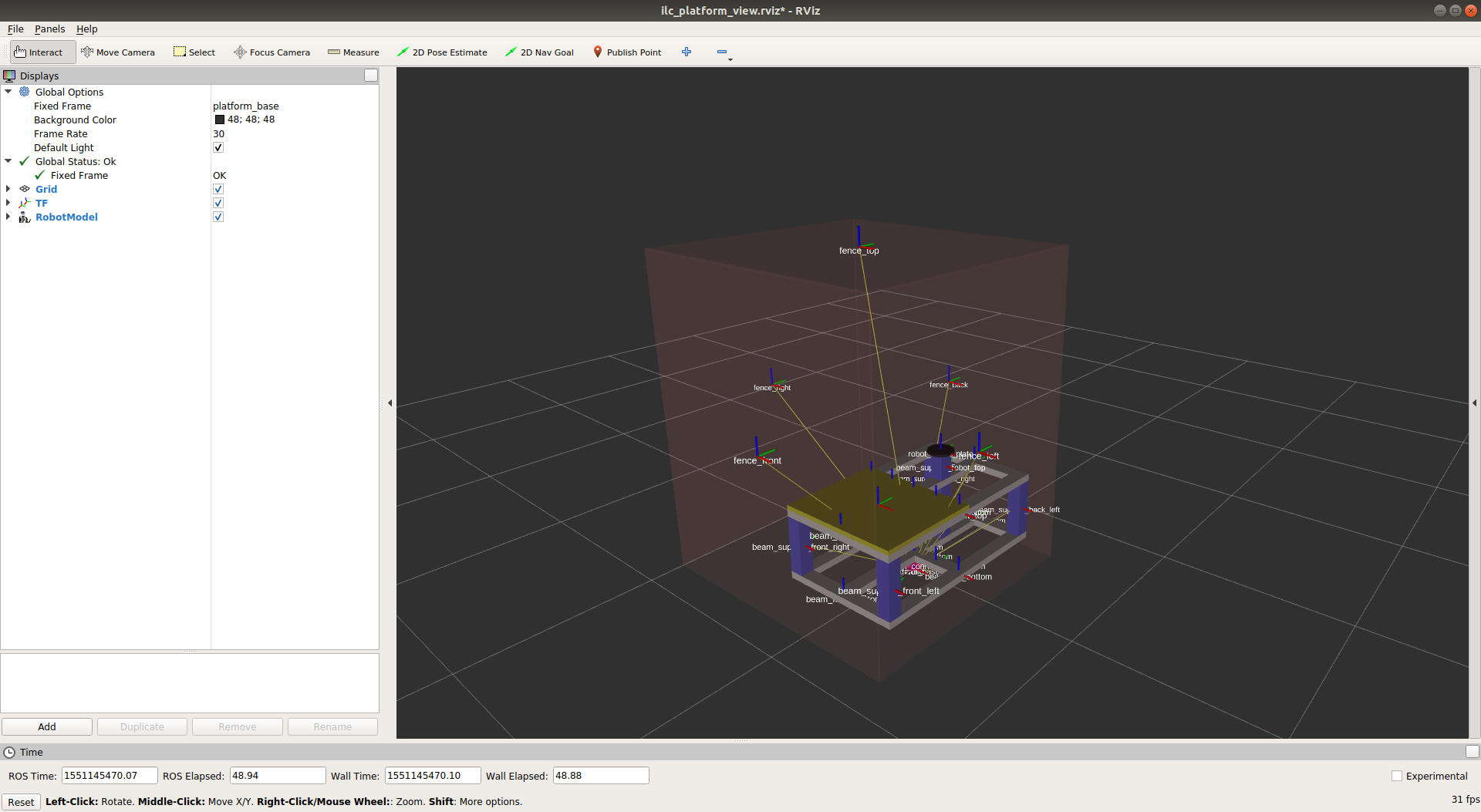
You can explore the details of the design in Rviz by running:
roslaunch random_pick visualize_ilc_platform.launch
The ilc_platform and fences are integrated with the UR5 robot
in examples/random_pick/random_pick/urdf/ur5_plus/ur5_hitbot_ilc_platform.urdf.xacro.
You can change the size of the ilc_platform and fences in the following lines:
<!-- platform -->
<xacro:include filename="$(find random_pick)/urdf/ilc_platform/ilc_platform.urdf.xacro" />
<xacro:platform platform_height="0.32"
platform_width="0.7"
platform_length="0.98"
connected_to="world"
xyz="0 0 0"
rpy="0 0 0"
up_beam="false"
fence_left_dist="0.5"
fence_right_dist="1.0"
fence_front_dist="0.8"
fence_back_dist="0.6"
fence_top_height="1.75"
fence_transparent="0.1"/>
If you change the values in the above lines in the two files, you can immediately see the result by running:
roslaunch random_pick visualize_ur5.launch
At the same time, the table and fences will also be changed in the MoveIt scene.