Random Pick (OpenVINO Grasp Detection)¶
Overview¶
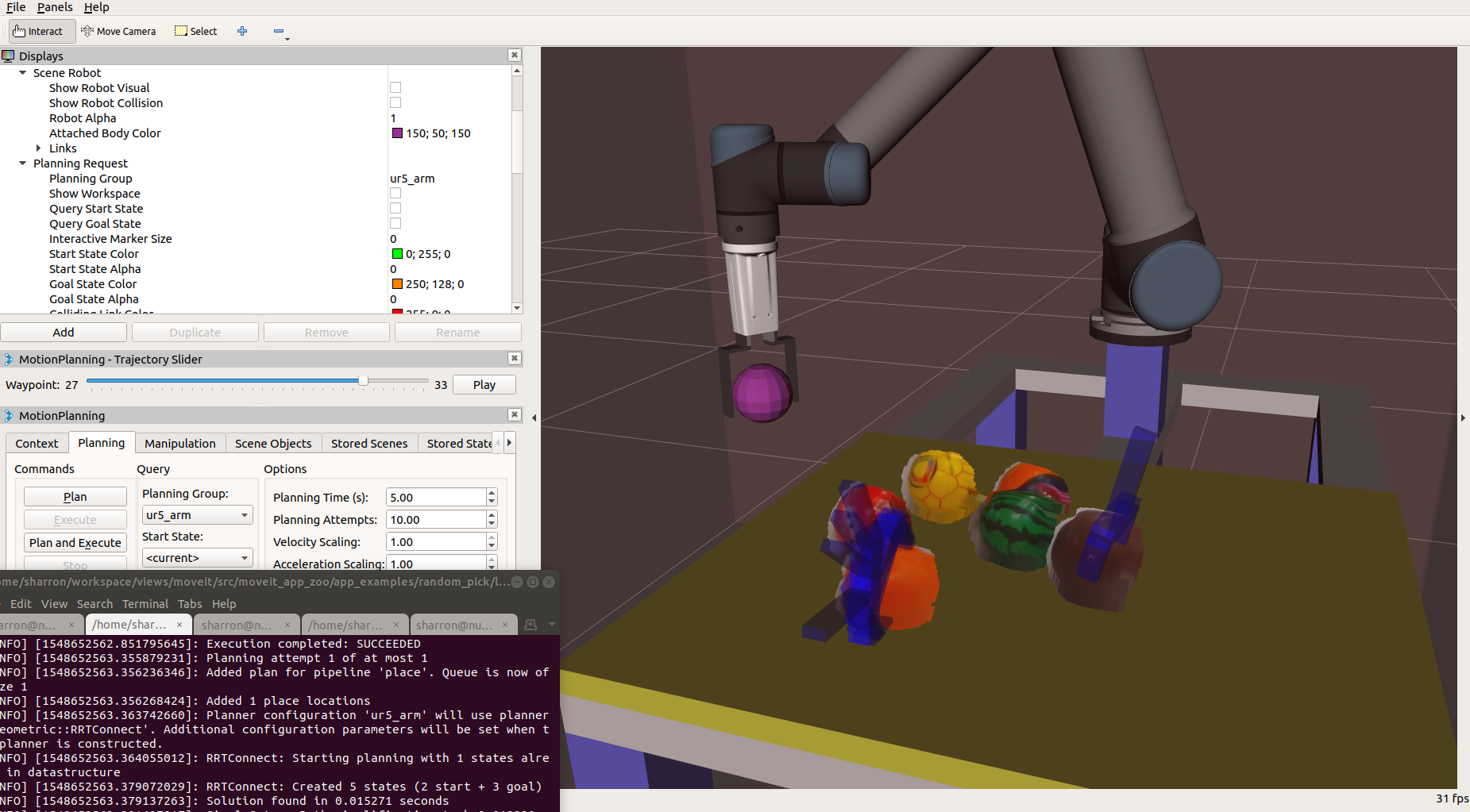
A simple application demonstrating how to pick up objects from clutter scenarios with an industrial robot arm. The application takes grasp detection results from OpenVINO GPD, transforms the grasp pose from camera view to the robot view with the Hand-Eye Calibration, translates the Grasp Pose into moveit_msgs Grasp, and uses the MoveGroupInterface to pick and place the object. Watch this demo_video to see the output of this application.
Requirement¶
Before running the code, make sure you have followed the instructions below to setup the robot to work with MoveIt The setup includes installing necessary robot URDF files, the MoveIt configures and SRDF files, and ROS driver for the robot control.
- Hardware
- Host running ROS2/ROS (sim/real)
- RGBD sensor (real)
- Robot Arm (real)
- Robot Gripper (real)
- Software
- ROS Melodic Desktop-Full (sim/real)
- MoveIt (sim/real)
- Universal Robot (sim/real)
- RGBD Sensor (real)
- Hand-eye Calibration (real)
- Grasp Pose Detection (sim/real)
sim: required for simulation. real: required for real robot execution.
Download and Build the Application¶
Within your catkin workspace, download and compile the example code
cd <path_of_your_catkin_workspace>/src
git clone https://github.intel.com/otc-rse/moveit_app_zoo.git && cd ..
catkin config --extend /opt/ros/${ROS_DISTRO} --cmake-args -DCMAKE_BUILD_TYPE=Release -DUSE_OPENVINO=ON -DBUILD_RANDOM_PICK=ON
catkin build
- Build Options
- USE_OPENVINO (ON | OFF ) Switch on/off openvino grasp detection
- BUILD_RANDOM_PICK (ON | OFF ) Switch on/off building of this application
Launch the Application with Fake Control and Recorded PointCloud¶
Launch a UR5 fake controller, following instruction Bring up fake controller, real controller and gripper controller
To view visual outputs, load rviz configure specific for this application from moveit_example_app/examples/random_pick/random_pick/rviz/grasp.rviz.
Play recorded PointCloud from
data/random_pick.pcb:
roslaunch random_pick camera.launch sim:=true
- Launch the application
rosrun --prefix 'gdb -ex run --args' random_pick random_pick
- Launch the OpenVINO grasp detection
roslaunch random_pick gpd.launch device:=0 plane_remove:=true
Launch the Application with Real Robot and Camera¶
Launch a UR5 real controller, following instruction Bring up fake controller, real controller and gripper controller
To view visual outputs, load rviz configure specific for this application from moveit_example_app/examples/random_pick/random_pick/rviz/grasp.rviz.
Launch the camera and publish hand-eye static TF frame
roslaunch random_pick camera.launch
- Launch the application
rosrun --prefix 'gdb -ex run --args' random_pick random_pick
- Launch the OpenVINO grasp detection
roslaunch random_pick gpd.launch device:=0 plane_remove:=true
Caution
Even though the application runs well on a fake controller, some unexpected motion planning or execution results would still happen on a real robot. For the sake of safe operation, it’s strongly recommended the operator keeps touching the “emergency stop” button of the robot and being ready to press that button timely in case of necessity.
Customization Notes¶
| device [0|1|2|3]: | |
|---|---|
| Configure device for grasp pose inference to execute, 0 for CPU, 1 for GPU, 2 for VPU, 3 for FPGA. In case OpenVINO plug-ins are installed, this configure deploy the CNN based deep learning inference on to the target device. Deploying the inference onto GPU or VPU will save CPU loads for other computation tasks. | |
| plane_remove [false|true]: | |
| Configure whether or not remove the planes (like the table plane) from point cloud input. Enabling this helps to avoid generating grasp poses across the table. | |
| target_frame_id [“base”|”string”]: | |
| Frame id expected for grasps returned from this service. When this parameter is specified, Grasp Planner try to transform the grasp from the original frame (usually a camera’s color frame) to this target frame, given the TF available. | |
| place_position [[-0.45, -0.30, 0.25]|[1*3 double]]: | |
| Place position {x, y, z} in the target_frame_id. | |
| joint_values_place [[1*6] double]: | |
| Place position in joint values. For each place, this parameter specifies the target joint values for the arm moving to the place position. | |
| joint_values_pick [[1*6] double]: | |
| Pick position in joint values. For each pick, this parameter specifies the target joint values for the arm moving to the pre-pick position. This position is usually above the work table. | |
| finger_joint_names [[1*2] string]: | |
| Joint names of gripper fingers. Joint names are filled into MoveIt’s grasp interface, to control the posture of hand for the position of ‘pre_grasp_posture’ and ‘grasp_posture’ (see moveit_msgs::msg::Grasp). Joint names are usually defined in URDF of the robot hand. | |
| finger_positions_open [[1*2] double]: | |
| Positions of all finger joints when the hand is in open status. | |
| finger_positions_close [[1*2] double]: | |
| Positions of all finger joints when the hand is in close status. | |
| eef_yaw_offset [PI/4|double]: | |
| The end-effector’s yaw offset to its parent link. | |
| boundry [[1*6] double]: | |
| Workspace boundy, described as a cube {x_min, x_max, y_min, y_max, z_min, z_max} in metres in the target_frame_id. | |
| object_height_min [0.028|double]: | |
| Minimum height in metres (altitude above the work table) of object to grasp. | |
| kThresholdScore [20|float]: | |
| Minimum score of grasp. | |
| grasp_approach [[0, 0, -1]|[1*3] double]: | |
| Expected grasp approach direction. | |
| approach_deviation [PI/9|double]: | |
| Maximum deviation angle to the expected approach direction. | |
| grasp_position_offset [[1*2] double]: | |
| Grasp position offset introduced by the system (e.g. camera, hand-eye calibration, etc.) {x_offset, y_offset} in metres in the target_frame_id. | |
Troubles Shooting¶
- MoveIt pick() motion planning failed with IK. This’s a known issue also observed in the pick_place app of MoveIt Tutorial. We reported the issue as #1278 and provided a workaround. Try rebuild moveit_core with this workaround.
- “moveit_kinematics” build failure with “ur3_kin” and “ur_kinematics”. This could be introduced by previously built artefacts. Try remove the folder “build/devel/share/ur_kinematics”, “devel/share/ur_kinematics”, then rebuild “moveit_kinematics”.